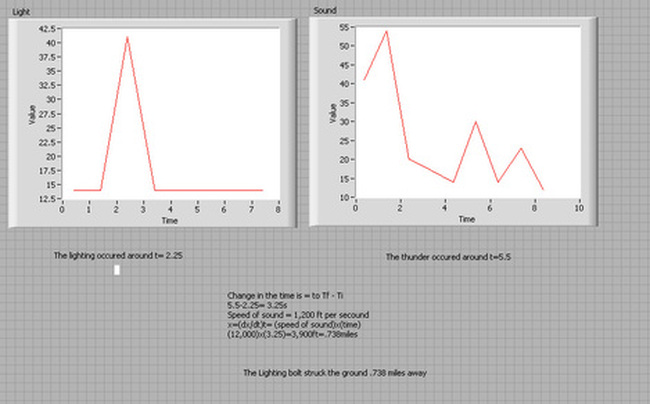
We built a robot with only a sound sensor and a light sensor. The purpose of the thunder bot was to record the time between a lightning flash and thunder boom. The time was then used to calculate how far away the lighting strike was by multiplying the time by the speed of sound, which results in a distance.`
