50 things I've learn
1 Using loops, 2 Using motor turn command, 3 using gear ratio,4 how to make a scanner, using investigator, 5 reading charts from light sensor, 6 working with sonar sensor,7 how to use containers, 8 clearing containers, 9 making a catapult, 10 using wheels for friction to have a robot climb a rope. 11 Calculating distance a robot travels, 12 calculating when two robots collide,13 learning how to use when dark command, 14 having a robot only loop through a command twice, 15 how to turn on a light bulb. 16 make a robot go faster using gears, 17 making a robot stronger through gears, 18 learned the responsibility of putting a kit together, 19 data logging, 20 loops. 21 flip direction, 22 random direction, 23 random speed, 24 random motor command, 25 building legs, 26 building a battle bot, 27 using motors as weapons, 28 climbing stairs using motors, 29 following a line, 30 fowling a line using containers, 31, 8 steps to engineering design, 32 random time, 33 touch sensor fork, 34 light sensor forks, 35 using containers in program 36 towards light sensors, 37 task split, 38 using video code, 39 making web pages, 40 customizing the look of the website, 41 putting files on Weebly, 42 writing paragraphs, 43 making a new site, 44 power levels, 45 temperature sensor, 46 waiting for temp command, 47 motor sync, 48 cam studio, 49 paint, 50 print screen
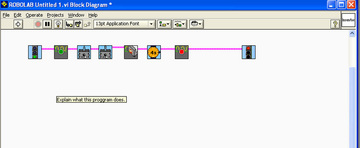
What is does this program do?
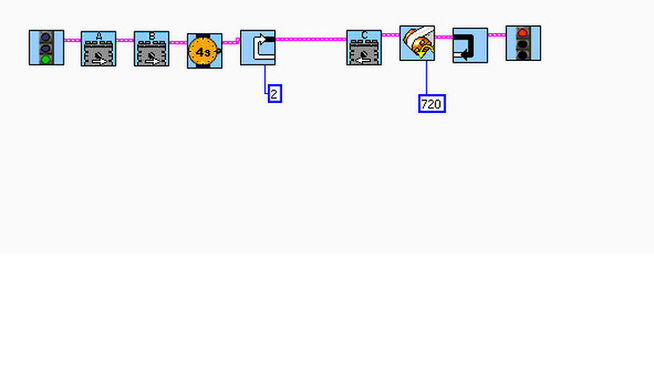
This program makes the robot A and B motors go straight , after 4 seconds, motor C waits to move 720 degrees twice and then it turns off the program.
?
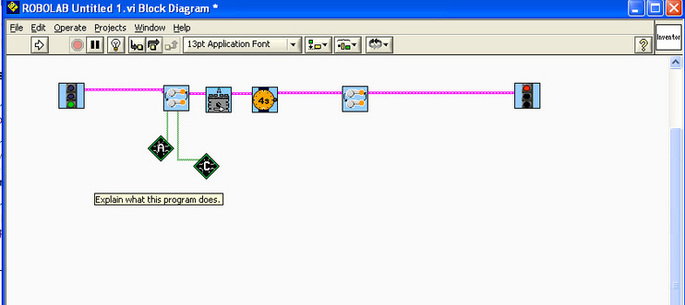
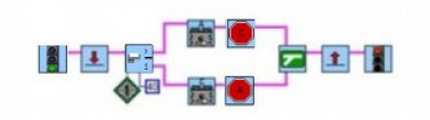
This program syncs motor A and C together so when it tells A to go for 4 seconds motor C goes for 4 seconds and then it stops. The program ends.
?
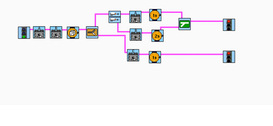
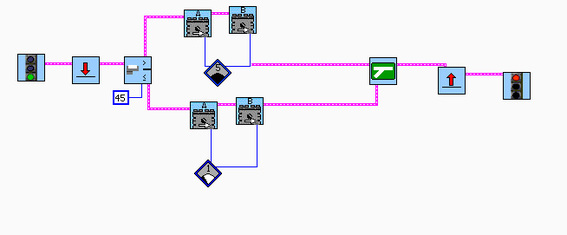
In this program motor A and B go forward for a random number of seconds, and then two things happen after the random time motor C turns on for one second. At the same time depending if the touch sensor is pressed in or not, if its out motor A runs for a sound and the program ends, motor B will still work because there is no stop sign for it. If the touch sensor is in the robot B motor turns on for 2 seconds, motor A still runs and the program ends.
?
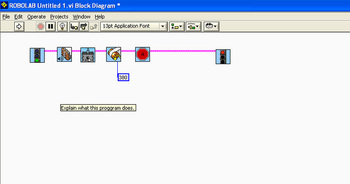
This program starts with a wait for sound command, so the robot waits until it hears and sounds and then once it does it turns on motor A Turing in 360 degrees. Motor A stops and the program ends.
?
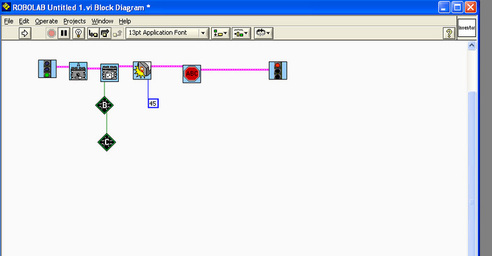
Motor A turns on and moves forward, motor B and C turn on and move in a random direction, the light sensor then waits for a light value stronger the 45 and the turns off the motors and the program ends.
?
Motor and A and B turn on and move straight, for 4 seconds during the time the light sensor records the information and send it to investigator.
Roach Bot
Light Sensor
Short anwsers
8 Steps for Engineering Design Process
STEP 1: Identify the Problem
STEP 2: Identify Criteria and Constraints
STEP 3: Brainstorm Possible Solutions
STEP 4: Generate Ideas
STEP 5: Explore Possibilities
STEP 6: Select an Approach
STEP 7: Build a Model or Prototype
STEP 8: Refine the Design
2mb
Prototype- is a experimental first draft of your creation that u put through test and figure out what u need to improve
My favorite challenge was scan-bot because it was that challenge that worked the best for men and I was debating whether you can actually scan letters I was surprised when the hidden letter matched perfectly with pre scanned letter.
STEP 1: Identify the Problem
STEP 2: Identify Criteria and Constraints
STEP 3: Brainstorm Possible Solutions
STEP 4: Generate Ideas
STEP 5: Explore Possibilities
STEP 6: Select an Approach
STEP 7: Build a Model or Prototype
STEP 8: Refine the Design
2mb
Prototype- is a experimental first draft of your creation that u put through test and figure out what u need to improve
My favorite challenge was scan-bot because it was that challenge that worked the best for men and I was debating whether you can actually scan letters I was surprised when the hidden letter matched perfectly with pre scanned letter.
Name each command
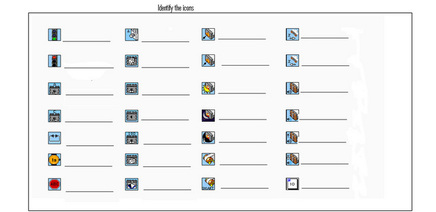
1) Begin
2) Lamp A
3) Wait for let go
4) Forward distance X
5) End
6) Motor random
7) Wait for push in
8) Reverse distance X
9) Motor A forward
10) Motor Forward or back
11) Wait for bright
12) Wait for loud
13) Motor C forward
14) Reverse
15) Wait for dark
16) Wait for Quiet
17) Flip direction
18) Motor power
19) Wait for darker
20) Wait for louder
21) Wait one second
22) Random direction
23) Wait for rotation
24) Wait for quieter
25) Motor A B C stop
26) Change motor speed
27) Wait for location
28) Wait for 10 points
2) Lamp A
3) Wait for let go
4) Forward distance X
5) End
6) Motor random
7) Wait for push in
8) Reverse distance X
9) Motor A forward
10) Motor Forward or back
11) Wait for bright
12) Wait for loud
13) Motor C forward
14) Reverse
15) Wait for dark
16) Wait for Quiet
17) Flip direction
18) Motor power
19) Wait for darker
20) Wait for louder
21) Wait one second
22) Random direction
23) Wait for rotation
24) Wait for quieter
25) Motor A B C stop
26) Change motor speed
27) Wait for location
28) Wait for 10 points
Final
| movie.wmv |
