Catapult
The design is based off of medieval catapults with weighted arm being released by a motor turning a Technic peice to release a rubber band releasing the arm sending the ball flying. During the test the ball only went like 5 feet. It seems as if the arm is not getting enough power to throw the ball. Our goal for our next prototype would be to improve the strength of the arm.
Flinga

This is simply a motor attached to beams in the air flinging the ball. During the test the ball only went 4 feet. this was due to the lack of power that the motors provided. It would be much better if instead of using motor power, we go back to using elastic power. elastics provide a much greater force. Our goal for our next prototype would be to create so sort of sling-shot that slings the ball.
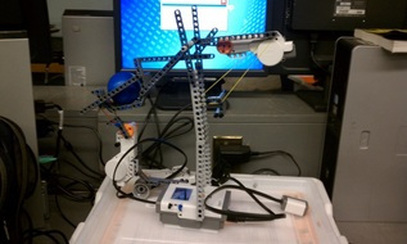
Cannon

This one is based off of cannons, you hold down the touch sensor to have the motor go, when the tension is too much it releases the ball sending it flying. During the tests it would average around 6 to 8 feet. The only problem was that the elastics in the front kept hitting the ball before it shot, cuasing a less distance of travel. The long tube to launch teh ball was so that the robot could pull the ball back further, and thus making the more energy to shot the ball.
