The data login bot was Designed with two mottor powering tow wheels. The mottor to wheels is a 2 to 1 ratio with the gears. this is becuase every one pin on the mottor is equal to 2 spins on the wheel. On one of the mottor theres a touch sensor attached. that collides with a wall on the robot, I designed, once every two spins on the mottor.
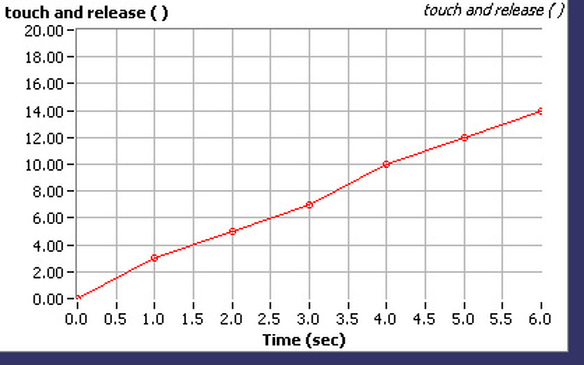
This graph shows the number of times my robot pushed the touch sensor in, during the 6 secounds motor C and B were going. The graph tells us that my robot clicked the push sensor every .6 of a secound. every touch sensor push is equal to 2 feet. so after my robot traveled the 12 feet in 2.5 secounds. The calculation to miles per hour woild be 3.27 miles pe hour.
The Program
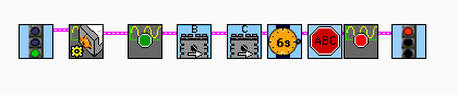
This program is part of the data login that i had to do for my robot. Basically what the command means is that its gonna record the times the touch sensor is pushed over time, while mottor B and C for 6 secounds. Then the data is sent to a graph, and that graph is r4ight above.
