Basket Ball Bot
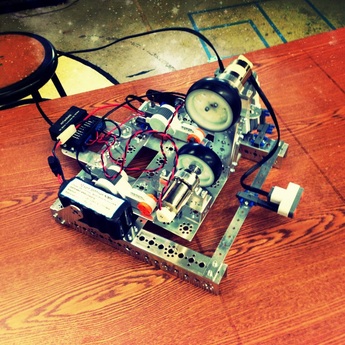
For our latest assignment, we are creating a robot that can throw a ball, from any distance, and have it land directly in a hoop. The research we needed was the math learned in my AP physics class, as well as the knowledge of how to use lab view and building robots that my partners and I have required throughout our entire robotic experiences.
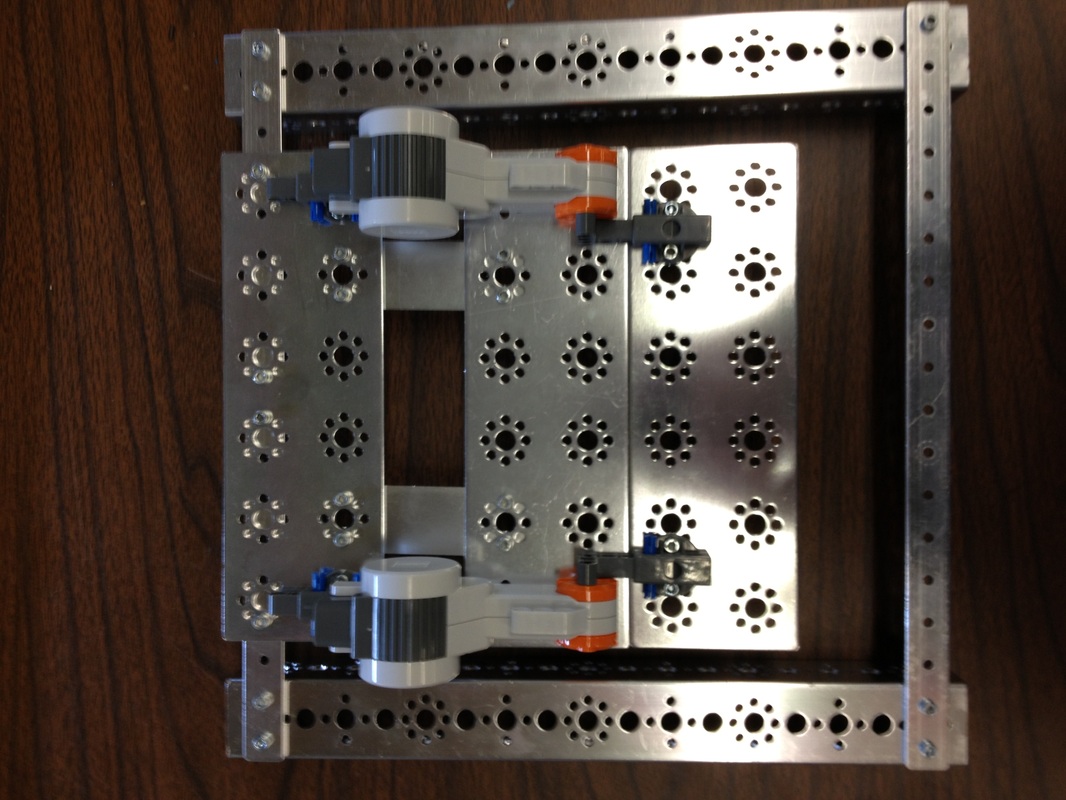
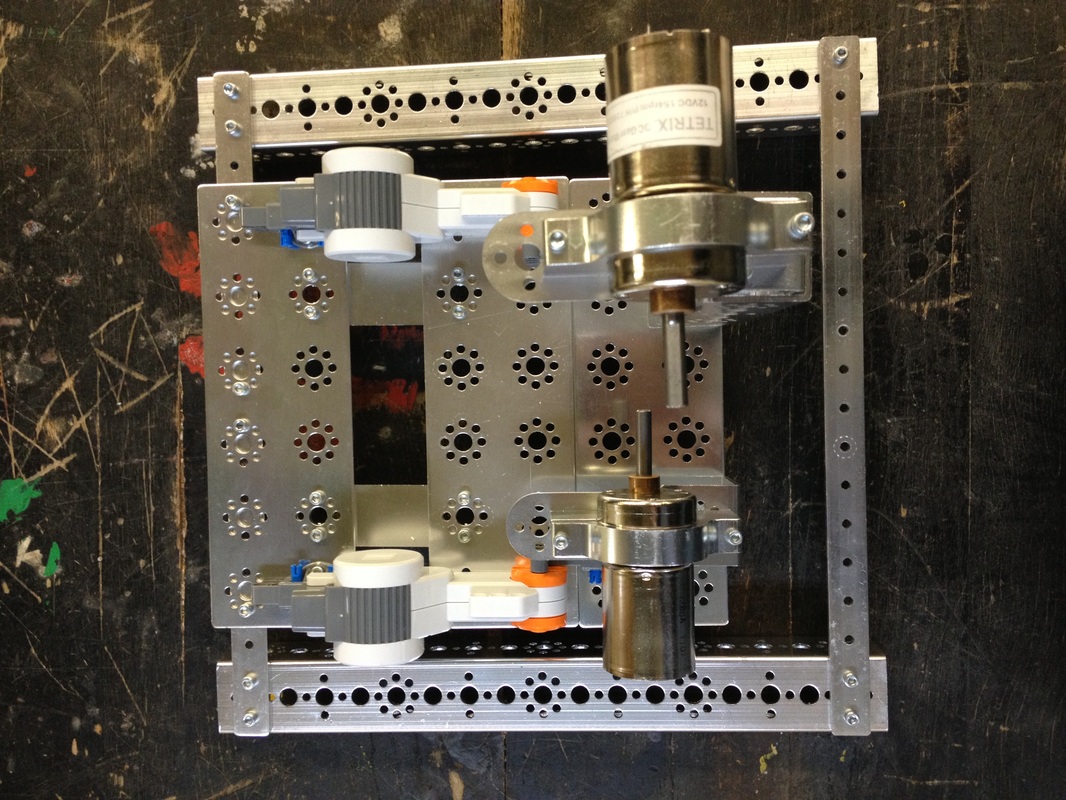
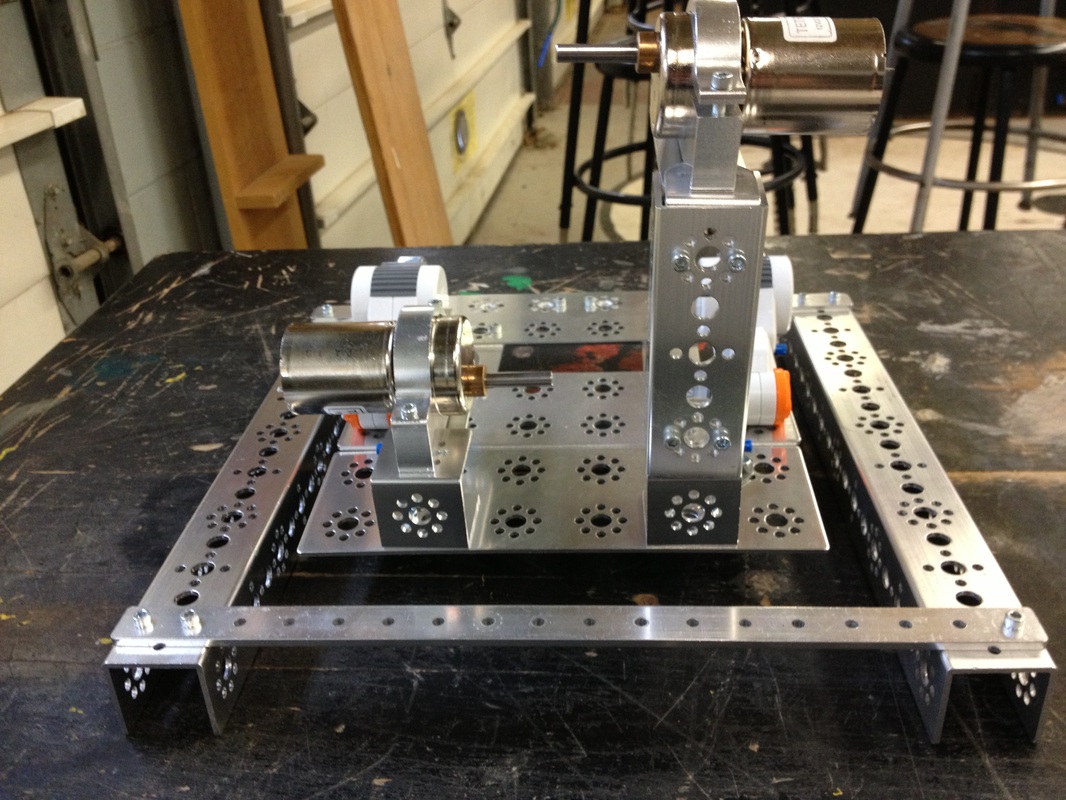
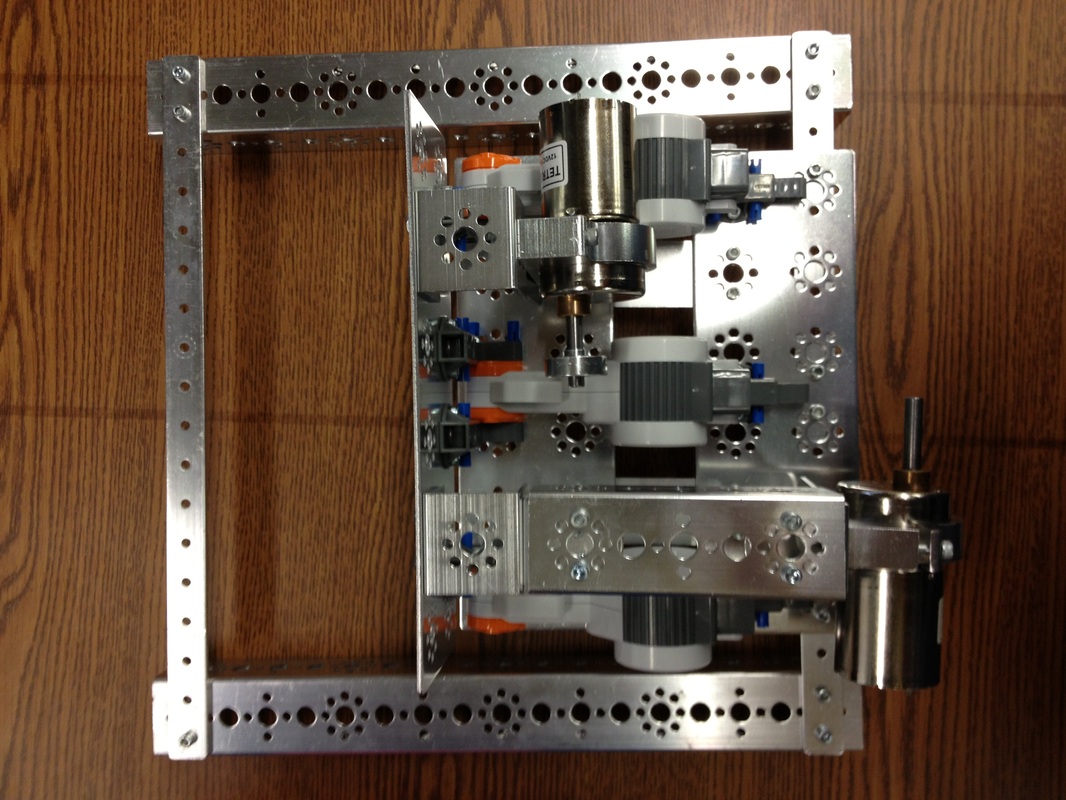
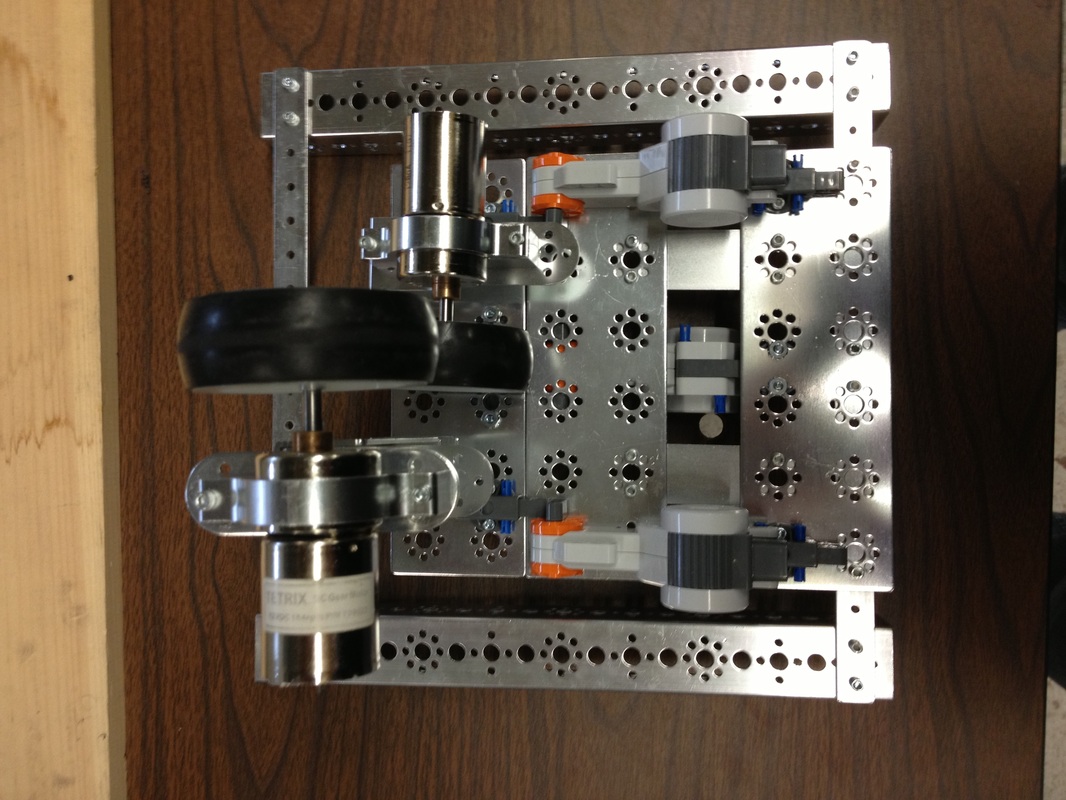
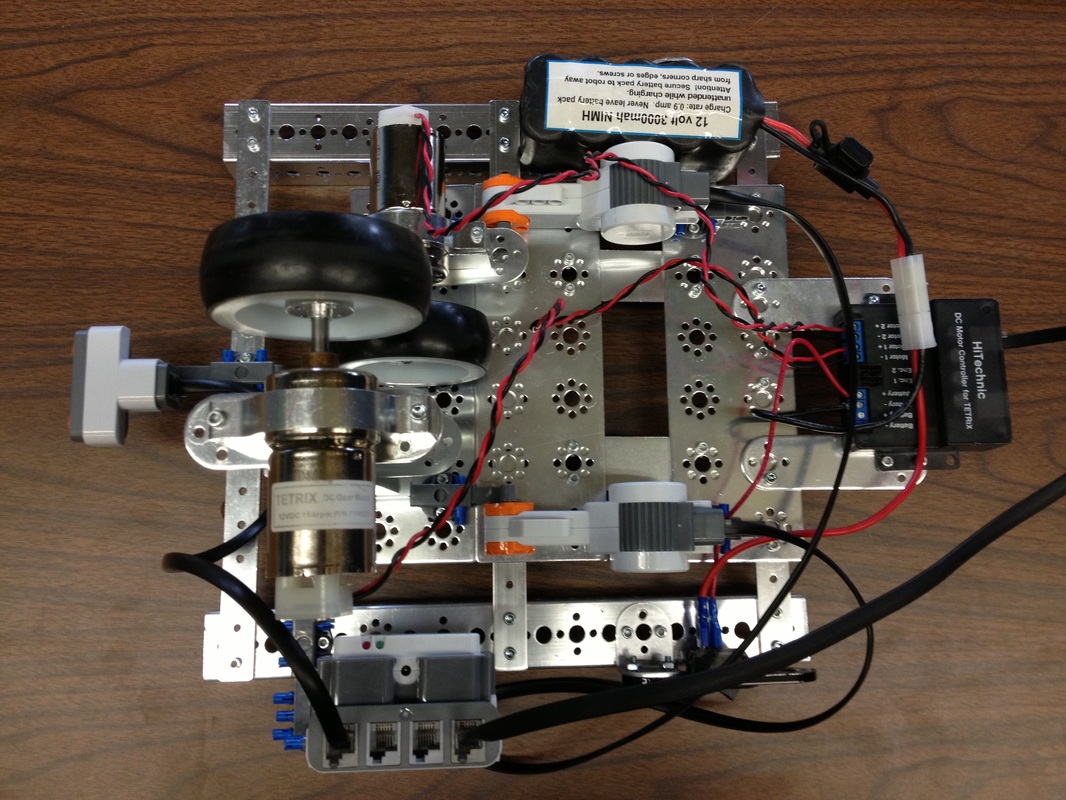
Building the robot was challenging at times, but for the most part it was smoothed creation that seemed to fit together like puzzle pieces. The only real problem was the position of the wheels. But with one little piece we were able to raise it up to the perfect position to fling a ball.
Building the robot was challenging at times, but for the most part it was smoothed creation that seemed to fit together like puzzle pieces. The only real problem was the position of the wheels. But with one little piece we were able to raise it up to the perfect position to fling a ball.


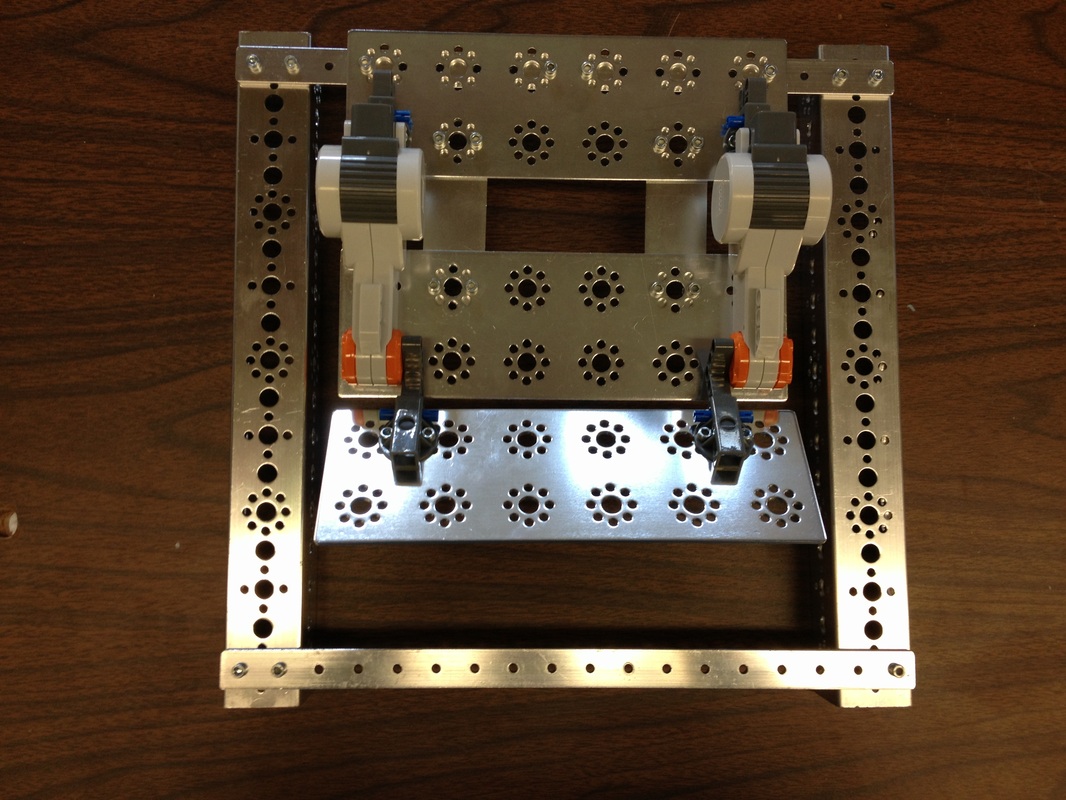
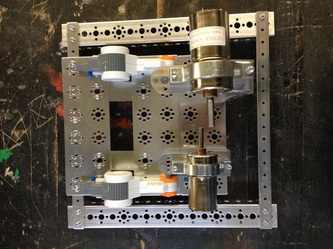

THE NEW BASKETBALL BOT
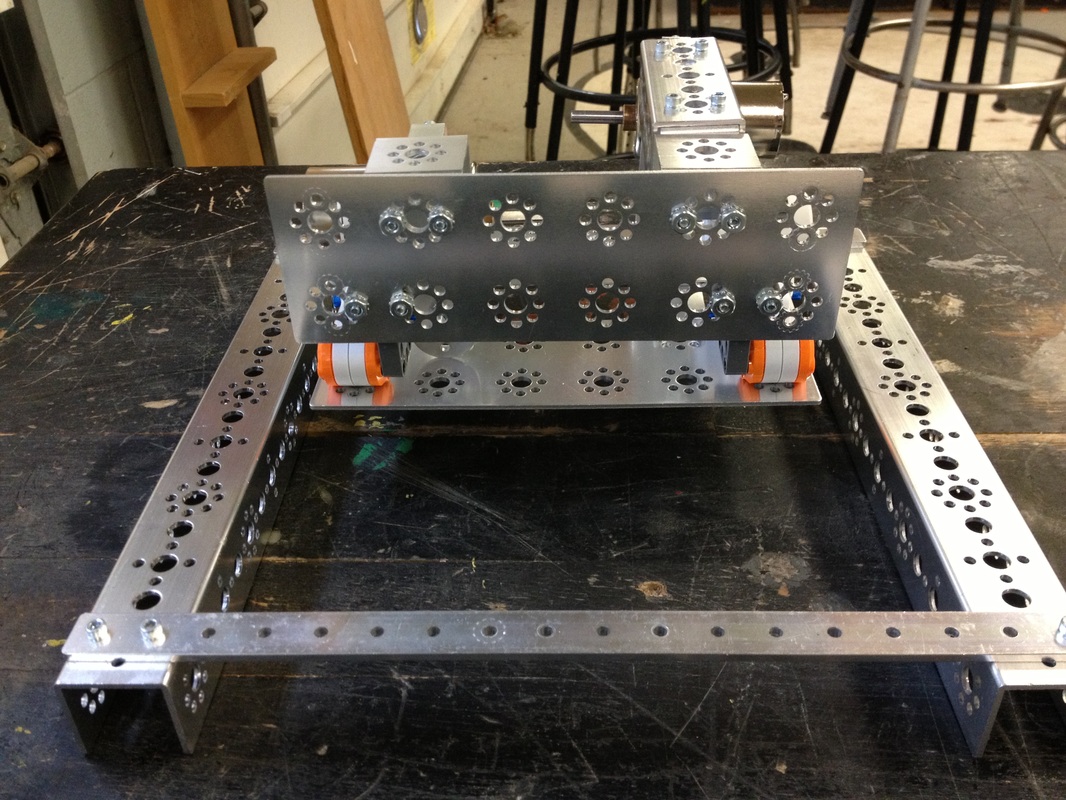
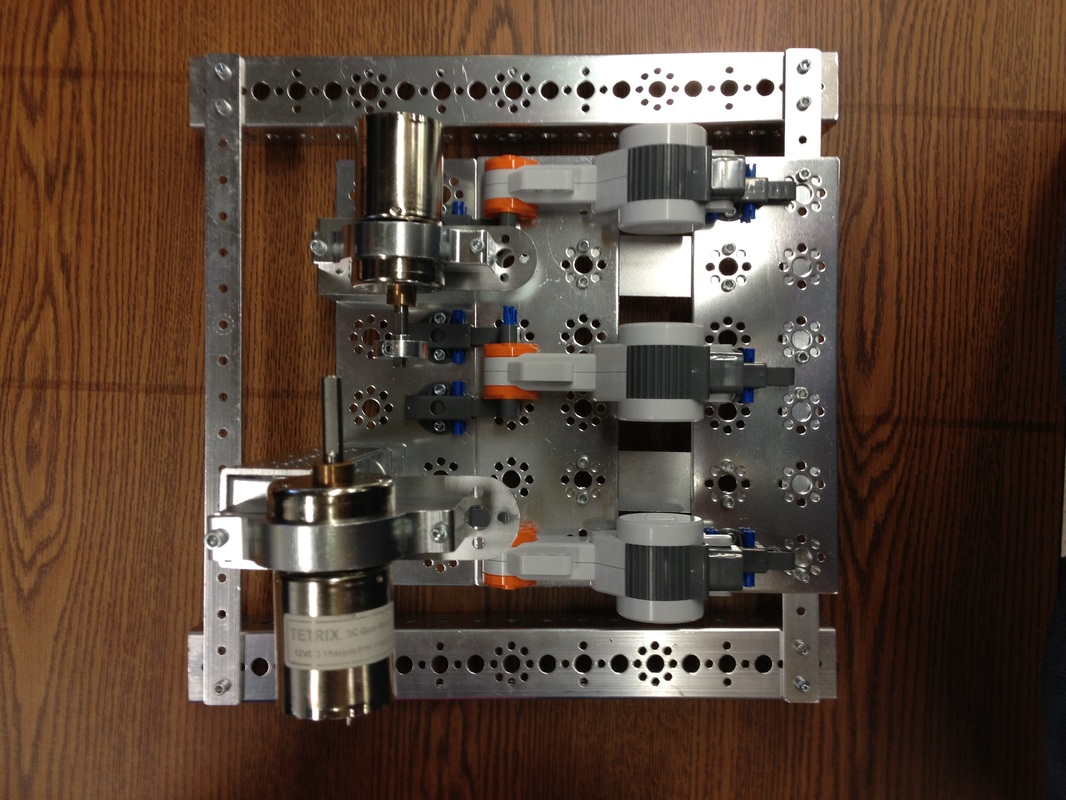
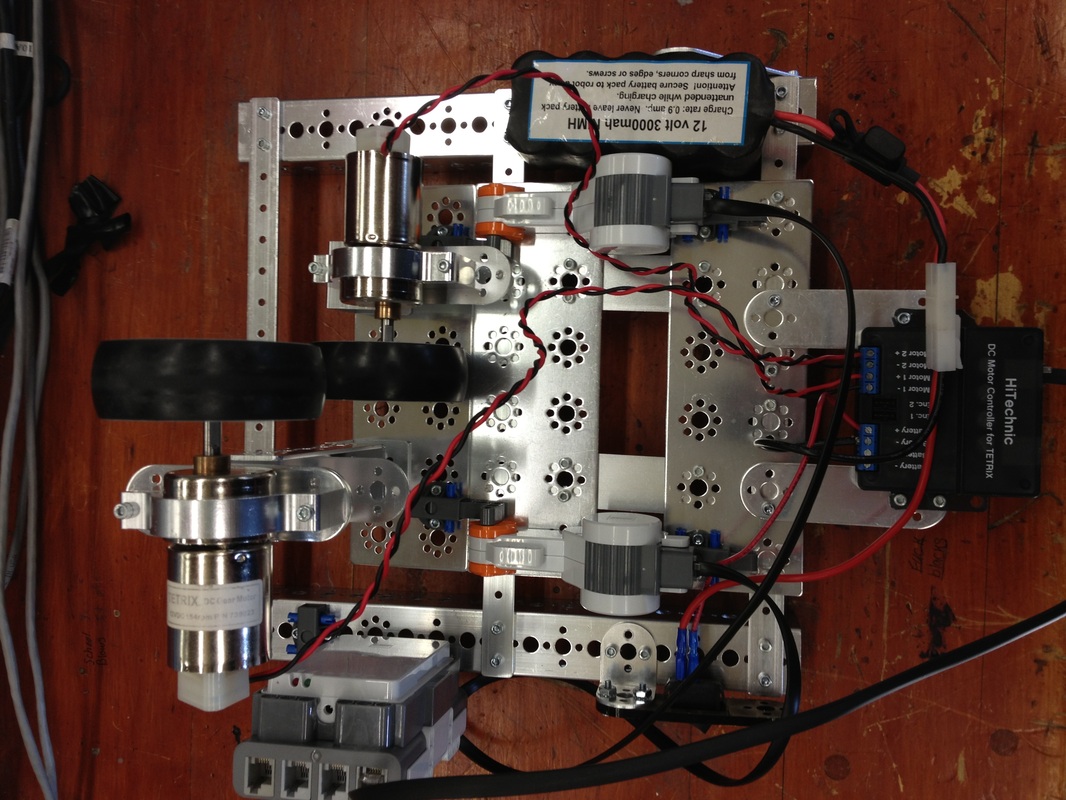
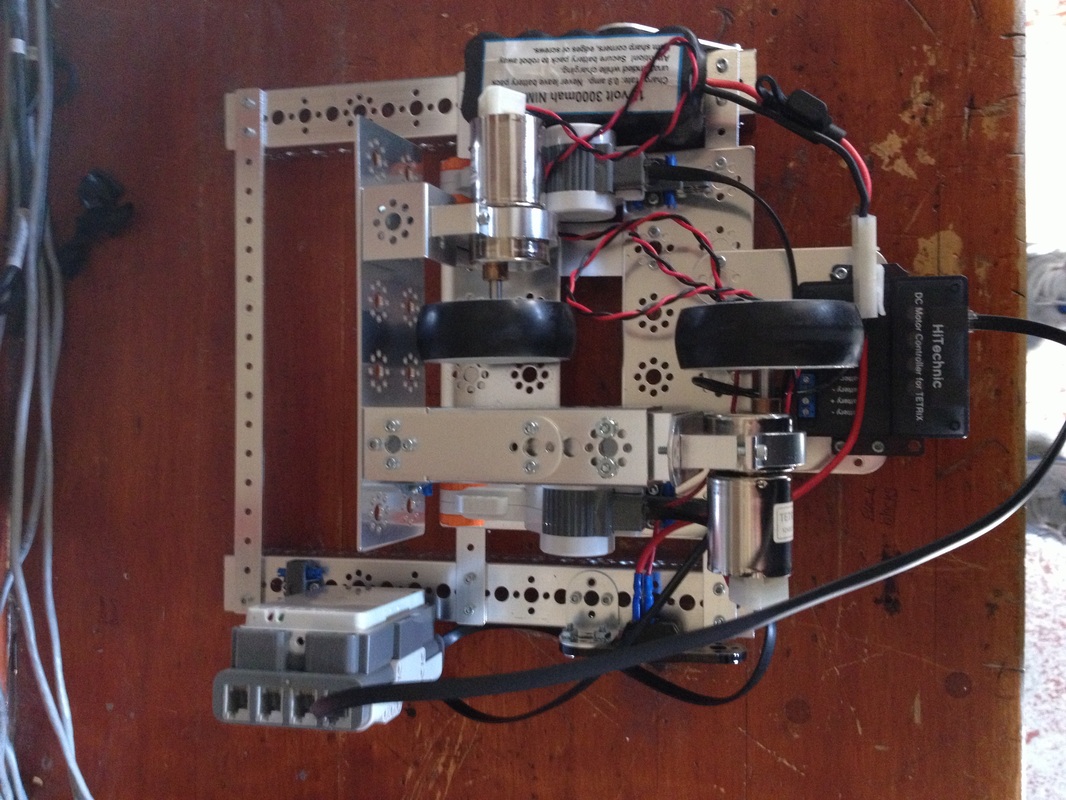
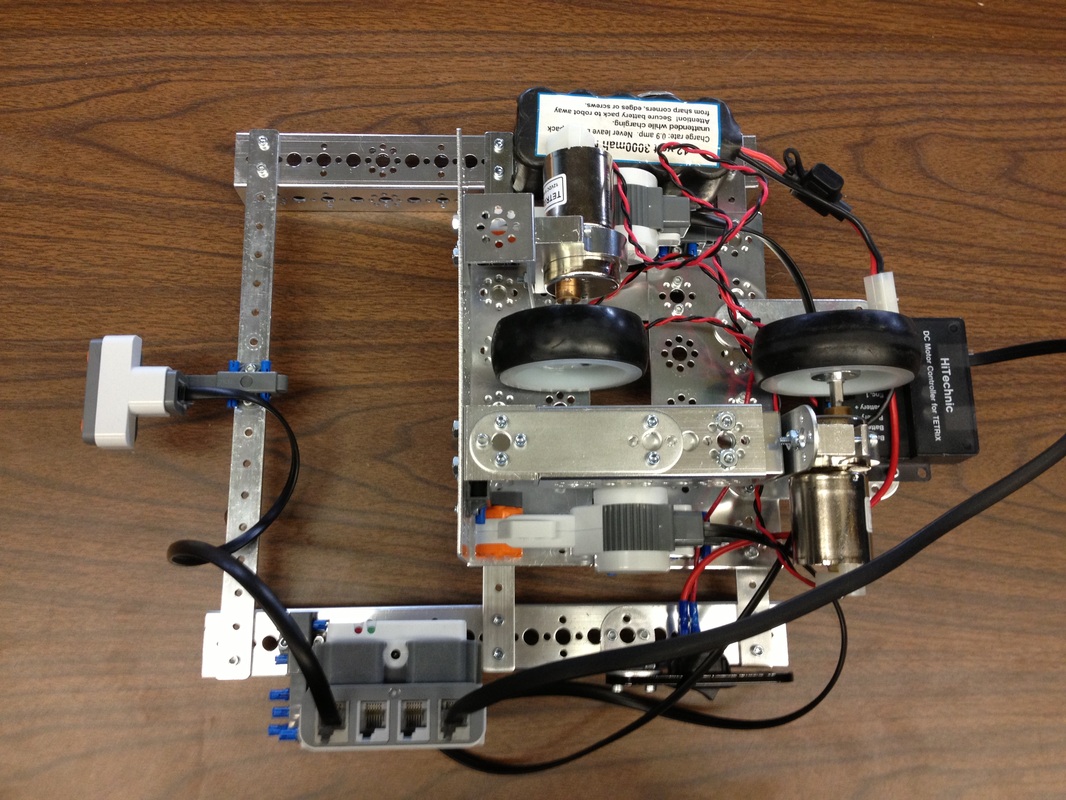
We went at this project again for a second time, in hopes of achieving what we didn't do before. Going into this assignment we took the problems that we had before and worked to make solutions to solve these problems. For example the spinning wheels weren’t fast enough to fling the ball at a measurable speed, so for our solution we geared up the wheels to spin twice as fast as before producing much more kinetic energy and torque that when added to the ball made the ball fly twice as fast.
