Prototype 1

The basis of this design is a set of two motors. one moves the robot forward. The other controls the steering of the robot. The next is then attach to the "car" and is pulled behind sort of like a trailer. during the test the robot was able to go straight and turn with little to no effort. Thing need to improve: work on a better was to keep the cart attach to the robot. start working on a a set of touch sensors, and a sonar sensor to get the robot through the obstical course.
prototype 2
For our second prototype. We designed a back trailer piece that connected to the robot. Additionally we added a set of touch sensors on the front, as well as a sonar sensor to see whats comming. Some problems with the robot are: the back connector keeps coming off, The front touch sensor is not needed becuase the sonar sensor advoids objects before it hits the wall.
prototype 3

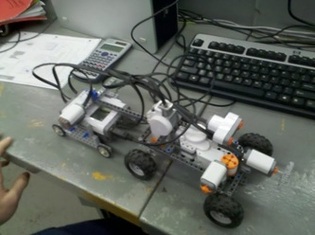
Our third and last prototype. the design was chnaged from pulling the cart as a trailer, to carring on the car itself. Additionally we put the touch sensor on the sides of the robot, instead of having one in the front. This is soo in case the robot turns into an onject it knows how to get out. During the test, our robot, made it out of the circle on its secound try, and did very seccesfully.
The Program
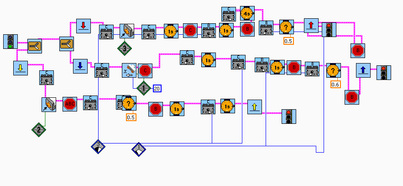
This program is actually pretty simple. There are three programs that run on this prgram one for each sensor. If the touch sensors are pressed it backs up and then turns in the opposite direction of where it get hits. If the sonar sensor come with in 20 inches of an object it stops backs up moves slighty to the right and then turns moves forward untill the robot see an object agein thus making it the perfect machine to over come the obstacle.
Obstacle Video
Reflections
The assignment was to bulid and program a robot that could excape a obstacle while only using a sonar sensor and a touch sensor.
The robot began with the idea of buliding a robot that had one mottor to move forwatrd and one to turn side to side. the program was simple to bulid a robot that when it sees a wall coming in 40 cm of it, stops and turns to aviod it. the robot is also equpied with two light sensors that act as guides on both sides if they get pushed in on either side the robot moves away from that area to the left/right according to the direstion of contact. when I first started programing the robot the program running on was filled with errors. Such as when the robot would not stop when it sees an object. instead it turned into it. Also the mottor on the wheels would turn back to far after a turn cuasing it to turn in the opposite direction.
Some feedback from my fellow peers telling me to use a mottor angle program rather the a wait for. thus making it a lot more percise.
I learned angle mottor program withch helped with the turning of the robot.
If we were to do this project again, i would perfer a bigger obstacle for the robot, in witch I could wright more programs for, and have it be a little more difficult the project it was. other then that I would want nothing changed.
The robot began with the idea of buliding a robot that had one mottor to move forwatrd and one to turn side to side. the program was simple to bulid a robot that when it sees a wall coming in 40 cm of it, stops and turns to aviod it. the robot is also equpied with two light sensors that act as guides on both sides if they get pushed in on either side the robot moves away from that area to the left/right according to the direstion of contact. when I first started programing the robot the program running on was filled with errors. Such as when the robot would not stop when it sees an object. instead it turned into it. Also the mottor on the wheels would turn back to far after a turn cuasing it to turn in the opposite direction.
Some feedback from my fellow peers telling me to use a mottor angle program rather the a wait for. thus making it a lot more percise.
I learned angle mottor program withch helped with the turning of the robot.
If we were to do this project again, i would perfer a bigger obstacle for the robot, in witch I could wright more programs for, and have it be a little more difficult the project it was. other then that I would want nothing changed.
