Line Follower (Chasy)
Following the step by step instruction given to us, I completed the chasy of the robot. Making sure that the robot was sturdy I went through my robot making sure all the bots were as tight as can be. Attaching the light sensor I used pieces from both kits and had the light sensor facing down at about 1 cm off the ground for a better acurate reading of the ground.
Follow This Link To See The Video: http://www.youtube.com/watch?v=ROQ3b6AvJfo
Follow This Link To See The Video: http://www.youtube.com/watch?v=ROQ3b6AvJfo
The Program
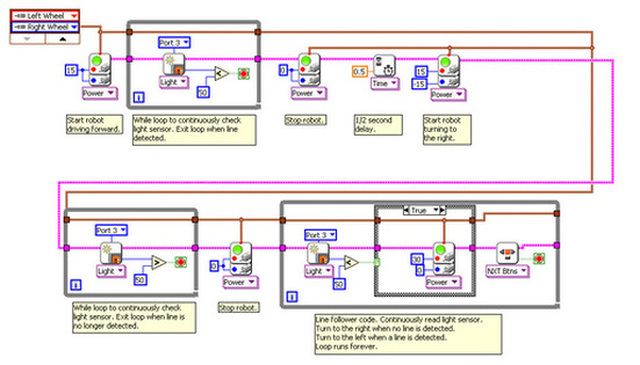
Combining what i knew from last year robotics a created a simular program to the one used in the previous line follower. Except with this new shematics I looped seperate programs and had them running when ever the given vaules were true and false.
The Schematics
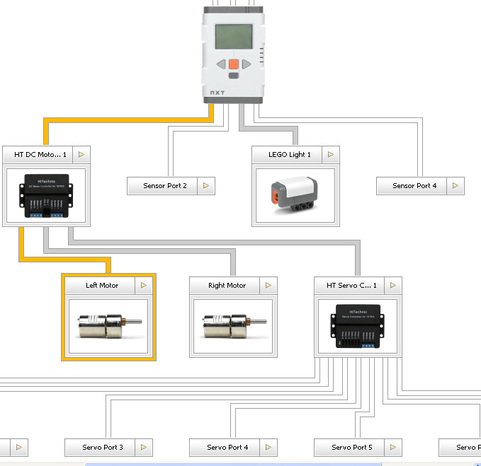
The shcematics I used for the Line follower robot is as shown to the right. in sensor 1 i have the DC motor controls thaty control my left and right motor. The Dc motor is also connected to the HT servo control that provides the current form the battery. THe ligth sesor that is used to record the light i put in port 3. I recorded the light vaules as it hit a light surface and when it hit a dark surface the vualue was less then 30 for light and greater then 30 for dark. I used this ionformation to program the robot to move right when it hit a vaule less then 30 and move left when it hit a vuale greater then 30.
